Con l’introduzione delle geomap a partire dal Phantom 3 Pro tutti i droni prodotti dalla casa cinese DJI vengono armati e quindi possono decollare solo se non si trovano all’interno di determinate aree. Attualmente le geomap DJI sono arrivate alla versione 2.0 che abbiamo descritto in un’apposita guida. Tali mappe sono abbastanza allineate anche con la cartografia aeronautica di ogni Stato, ma attenzione, non ne viene mutuata la legislazione vigente in termini di restrizioni dello spazio aereo. In nessun caso le geomap DJI dovranno essere utilizzate come riferimento legale per volare.
Sostanzialmente esistono due tipi di zone che interdicono il volo, ripetiamo non in base alle legislazioni nazionali ma in base a precise scelte della casa costruttrice: le zone blu e le zone rosse. Le altre zone, gialle e arancioni, segnalano un warning che avvisa l’utente di volare con prudenza, ma non interdicono il volo.
Per poter volare nelle zone rosse DJI è necessario chiedere che sia la stessa casa costruttrice (scrivendo a flysafe@dji.com) a sbloccare manualmente il seriale del flight controller del drone: le zone rosse sono massimamente concentrate attorno agli aeroporti, alle carceri e altri siti altamente sensibili, quindi al richiedente è richiesto il permesso dell’autorità competente affinché DJI proceda allo sblocco, che generalmente avviene in 24H (si consiglia comunque di richiederlo con qualche giorno d’anticipo).
Per poter volare nelle zone blu DJI è necessario seguire un’altra procedura denominata self unlock o meglio self-authorize, che l’utente dovrà completare direttamente sul sito DJI in maniera autonoma. L’autorizzazione sarà di fatto immediata. In questo contributo tratteremo questo caso nello specifico e vedremo brevemente come procedere.
Come controllare se vi trovate nella zona blu o se andrete a volare in una zona blu? Nella pagina dedicata del sito internet o meglio, con il drone acceso e collegato, attraverso l’app DJI GO o DJI GO4 nella sezione “Flight Restriction Information”, oppure nella DJI Fly nella home in alto a sinistra “Zone di allarme attivate”. Solo l’applicazione su smartphone/tablet garantisce all’utente che la versione delle geo zone visualizzata sia la più aggiornata, a differenza del sito internet. Questo perché DJI privilegia il software collegato al drone che ne impedisce il volo in caso di esigenza. In qualsiasi momento infatti i tecnici della casa cinese possono aggiungere divieti di volo a seguito di particolari eventi in corso.
Una volta capito che avete bisogno di un self-authorize per volare, bisogna procedere allo sblocco del drone. Questa attività si può anche fare sul campo, richiede giusto qualche minuto del vostro tempo, a patto naturalmente di avere sufficiente connessione internet. Per prima cosa è necessario possedere un account DJI: se siete possessori di un loro drone lo avrete sicuramente creato per attivare il velivolo la prima volta che siete andati a volare. Se siete semplici utilizzatori dovrete crearne uno seguendo la procedura proposta dalla pagina di registrazione.
Una volta registrato e convalidato l’account tramite carta di credito, carta di debito o numero di cellulare, si può tornare sulla pagina del self unlock per procedere allo sblocco del drone. La check list è molto semplice:
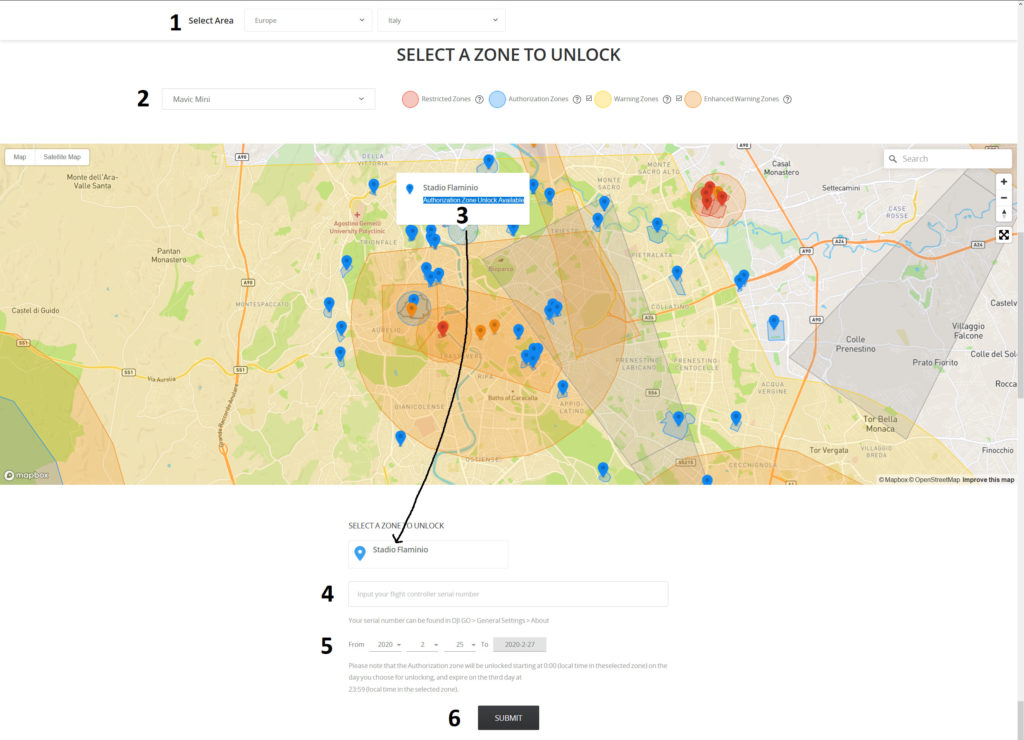
- Selezionate il Continente (nel nostro caso Europa) e il Paese di cui volete vedere le restrizioni (nel nostro caso Italia): il sito internet riconosce che siete in Italia quindi selezionerà automaticamente per voi queste impostazioni, tanto più se avete la geolocalizzazione del browser attiva. Naturalmente se dovete programmare un viaggio modificate con le voci del menu a discesa corrispondenti alla vostra destinazione.
- Inserite il tipo di drone con il quale volete volare: è presente praticamente tutta la lista dei droni DJI compreso le centraline A3 e N3 che possono essere usate su droni autocostruiti (tipo i vecchi frame F450 o F550 o altri modelli non DJI).
- Selezionate sulla mappa i pin blu corrispondenti alle aree che risultano bloccate e nelle quali non è possibile armare il drone. Si faccia attenzione che: i pin rossi corrispondono a zone dove il self unlock non è consentito; i pin arancioni e gialli corrispondono a zone dove sono presenti dei warning zone che vi avvisano di volare con cautela, ma nelle quali è comunque possibile armare e volare con il drone.
- Una volta selezionato il pin blu di vostro interesse, si aggiornerà automaticamente la zone to unlock sotto la mappa. A questo punto bisognerà inserire il seriale del flight controller presente sul drone: recuperare questo dato è molto semplice, si fa direttamente dall’app sullo smartphone/tablet seguendo il percorso DJI GO > General Settings > About
- A questo punto non rimane che selezionare la data dalla quale volete che sia attivo lo sblocco. Si tenga a mente che lo sblocco inizierà alle ore 0:00 (mezzanotte) locali e sarà valido fino alle 23:59 locali del terzo giorno successivo. Di fatto dunque lo sblocco è predefinitamente attivo per 72 ore, scadute le quali si dovrà procedere a nuova richiesta.
- A quel punto premendo sul tasto submit si invia la richiesta al server DJI che la processerà nel giro di qualche minuto.
Bisogna ricordare che è necessario richiedere lo sblocco del drone per ogni zona blu o rossa con la quale si dovrà interagire: è possibile infatti che queste zone siano confinanti tra loro, blu/blu, blu/rossa, rossa/rossa, e sarà necessario inviare la corretta richiesta di self-authorize o unlock per ogni zona, per evitare che il drone decolli per l’area di cui avete il permesso, ma poi il drone si fermi al confine o atterri immediatamente se interagite con un’area di cui non avete il permesso.